一个G-Sensor,搞定GNSS定位静态漂移+智能低功耗控制
Air780EGP、Air780EGG系列通信定位模组,秉承LuatOS二次开发、高集成与低功耗核心优势的同时,针对定位终端的真实痛点,做出了一项关键设计——内置G-Sensor加速度传感器。
两款模组以差异化配置适用不同场景需求:
Air780EGP:
4MB Flash+4MB RAM,满足大多数项目的开发需求。
Air780EGG:
8MB Flash+8MB RAM,适合功能更复杂的应用。
其内置的G-Sensor加速度传感器(型号为苏州明皜的DA221,I2C地址为0x27)——支持振动检测功能,可通过LuatOS的exvib扩展库调用。
你可能会问:
我要的是GNSS定位,为什么给我安排一个G-Sensor做振动检测呢?
安排一个G-Sensor做振动检测,主要集中在以下两大实用场景。
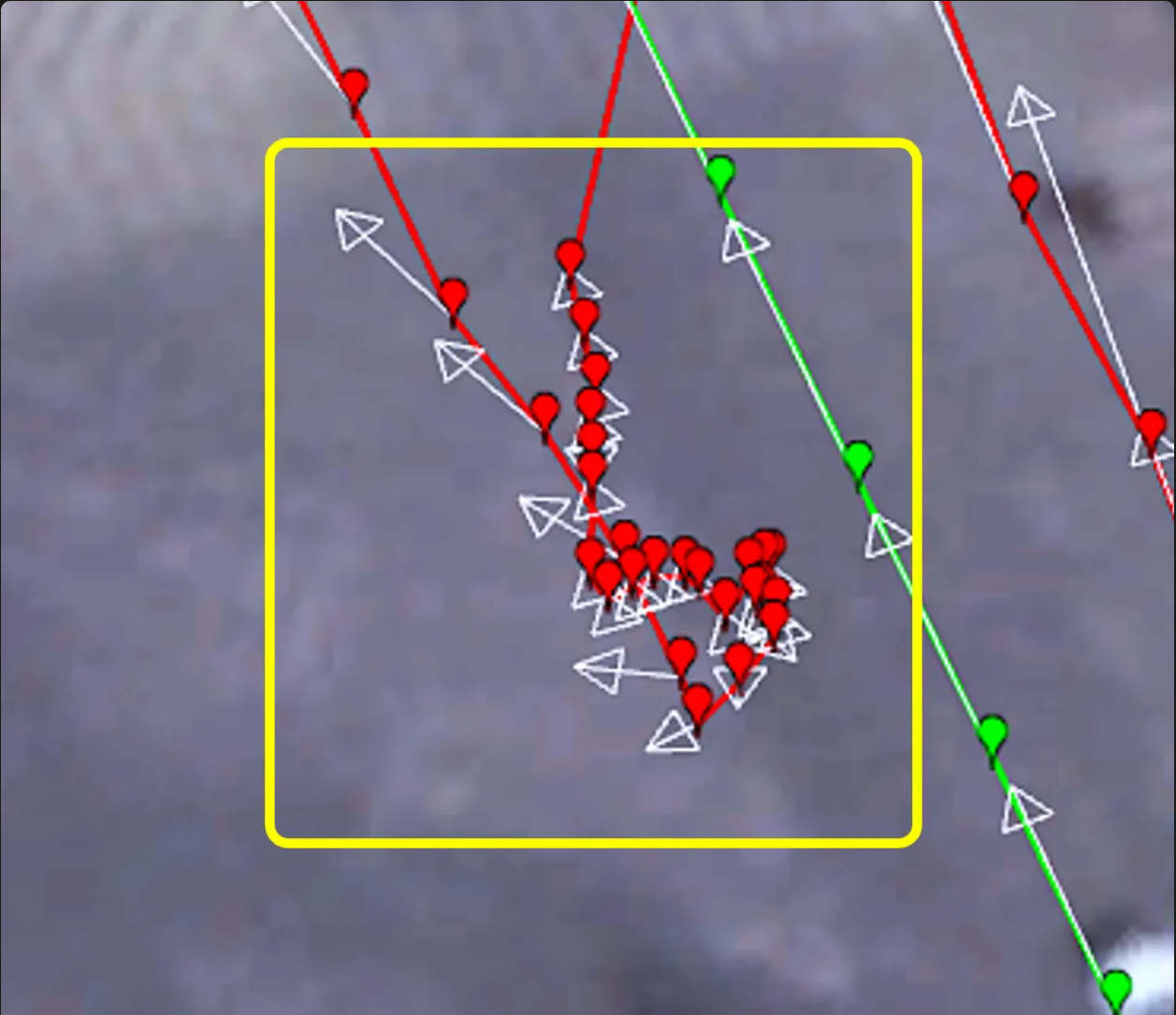
一、滤除GNSS静态漂移
GNSS定位中的静态漂移是什么现象?
简单来说就是GNSS在静止时的定位会东飘西飘,无法固定在一个点,无法像运动状态时可以比较准确。
从地图上来看的话,会看到无数个漂移的点在实际位置飘来飘去,我们通常把这种现象叫做“GNSS静态漂移”。
GNSS静态漂移无法根除,主要原因如下:
1)卫星信号相关因素:
GPS卫星在发射信号后传播过程中会遇到多种干扰因素,包括大气层电离层变化、云层遮挡等天气影响;
卫星信号受到干扰或遮挡会导致定位不准确,特别是在高楼林立的城市环境或山区、森林地带。
2)环境干扰因素:
周边高大建筑物的多径反射造成信号误差;
网络传输不稳定可能导致定位数据丢失,造成设备在地图上显示“飞跃”现象。
那么,静态漂移有办法处理吗?
有,办法就是——滤除
你静止时可以飘,我不记录你飘的数据,不在地图上显示不就行了吗?
那么,怎么判断静止状态呢?
——使用G-Sensor
通过G-Sensor的加速度值,做相应的振动状态判断,进而将静态漂移滤除,这就是G-Sensor在GNSS定位系统中存在的意义。
关于振动检测,我们提供了exvib扩展库供大家使用:
二、实现智能低功耗控制
除了滤除静态漂移,系统通过低功耗控制算法,还可以在终端静止时关闭GNSS达到省电的目的,这也是G-Sensor在GNSS定位中一个常见的应用场景。
这也是我们通常推荐Air780EGP、Air780EGG两款型号优先于Air780EGH(未内置G-Sensor)的原因。
需要注意的是:
G-Sensor在多数应用场景中需长期开启,这会在一定程度上增加系统功耗,尤其在低功耗模式下更为明显。这是正常现象,在设计电源与续航方案时需提前考虑。
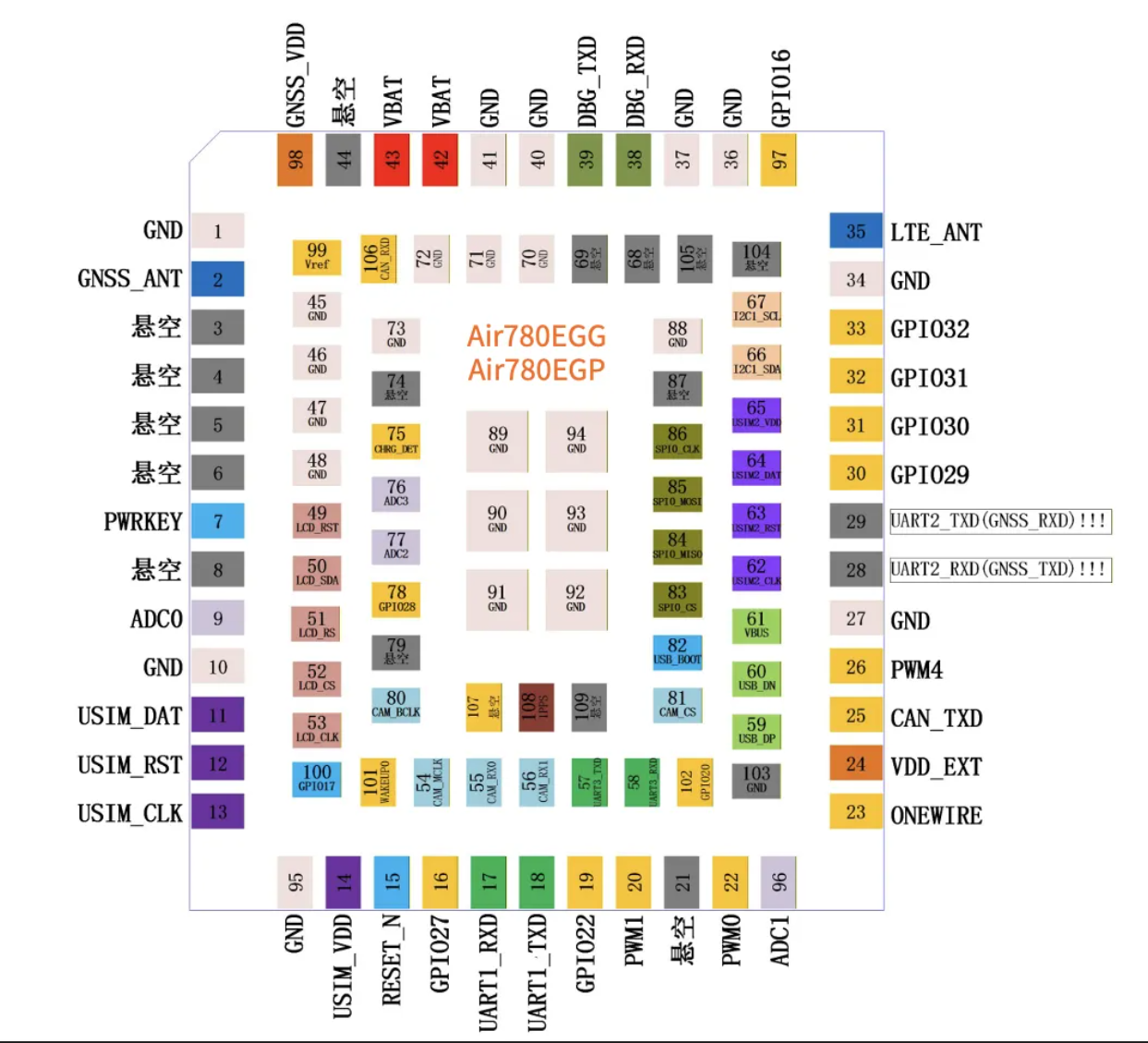
内置G-Sensor后,必然会占用系统的资源,比如G-Sensor的供电控制,比如G-Sensor判断振动后的中断输入等。
内部占用的信号管脚,如下图表说明:
今天的内容就分享到这里了
2026-02-09 11:55:34
目录 返回
首页